April 26, 2010


The challenge today is to use levers to pick up a cup.


This idea catches on the top rim.


From a simple working idea to extensions ---


The "sandwich" idea works.

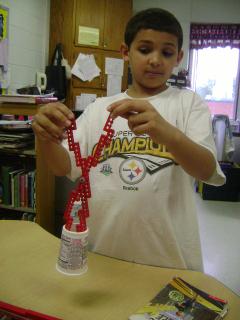
The next challenge was to be more than a foot from the cup.

A complex set of levers extends farther.


How could the bot do the picking up? The cam rotating could do
it.


Wow, this is long.


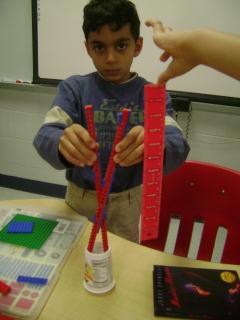
So is this.


One way extends with little angle and distance change and the other
needs a lot.
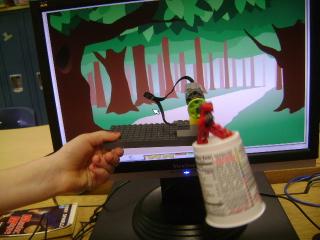
Lever works with WeDo, too.