Culloden Elementary

May 12, 2006






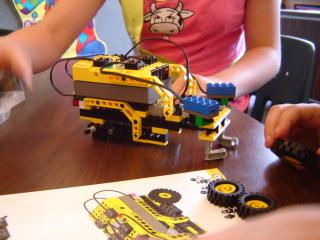
Today the students built and programmed the light follower. This build is from the cities and transportation
set. It consists of two light sensors and one motors that powers a neat gear system. The one motors
can make the robot turn in both directions.


The students programmed the robot so that if one light sensor read a reading brighter than the other sensor,
the wheel opposite to the brighter sensor turned, making the robot follow the light. When a flashlight is
held in front of the bot it will follow wherever the light leads it.