February 6, 2006
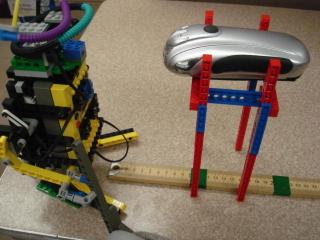

A stand was built to hold this flashlight.
Using the Investigator programming in RoboLab,
a program was downloaded to the RCX to have it data log 50 light sensor readings each .1 second.

The program was run as the light was moved from 10 to 20 to 30 cm away from the light sensor.
The light was held at the three positions for a second.

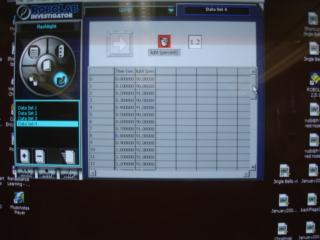
That data was Uploaded to the computer. It can be viewed as a line graph, data, or bar graph.
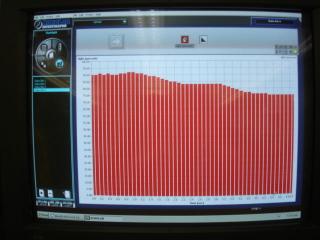
Using the three points (0, 90), (25, 83), and (50, 76)
representing the reading at time zero at 10 cm, time 2.5 at 20 cm, and time 5 at 30 cm
estimate the light sensor reading at 40 cm.

See the actual reading.

Saturday, February 18, a group from Norway is going to do robotic projects using Red Rover.