Motor Block for Arm

September 19, 2005

First they got out the Team sets and some old robots.
"This one goes too fast." That was the comment
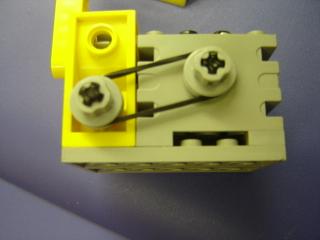
so they went to work changing the gearing to be 24t to 40t
instead of 8t to 40t.
Then they set up a motor block for an arm.

The first problem with programming was that the batteries were too low.
4 minutes later the firmware was back on and ready.

Then they wrote and saved a line follow program.