

May 20, 2011
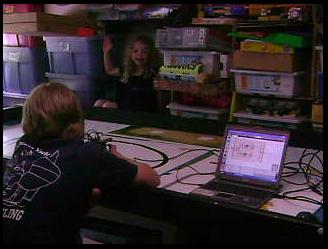
We had robots and computers for every one.
Each member of the team programmed.



We used sensor information to control the bots.
All the sensors were used.
Some of the programs used loops and or "switches" (conditional).

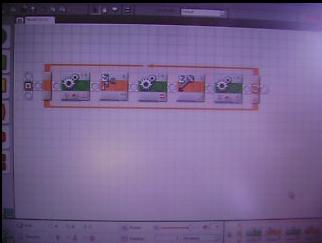
Wait for sound was fun.





Maze Robot
 Farm
Farm