Miller 3rd
March 14, 2006


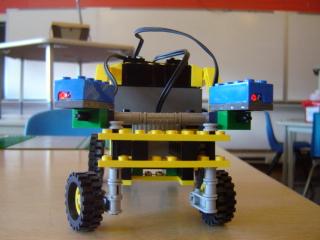
The students built a robot that had two light sensors on the front. They programmed the robot
to follow a bright light. When the sensors read that a bright light was shining, the robot responded
by following the light to its source, in this case, a flashlight.

There were some intricate gears used in this project so that one motor could be used to make the
robot go forward and turn in both directions.



