May 22, 2007

This is the same project as yesterday with older students.
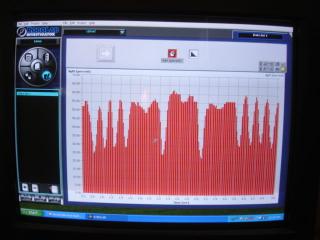
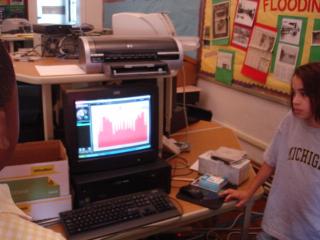
Try to figure out from the graph of the light sensor data which lines the robots traveled over.


The robot goes forward then back so the data is symmetric about the middle.

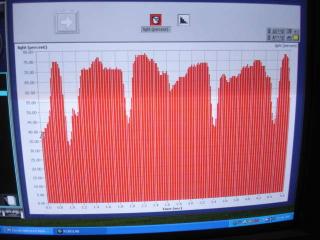
White has higher readings than black.
The idea that the high red parts are white data
and the low white parts are reading from the black lines was confusing for some at first.

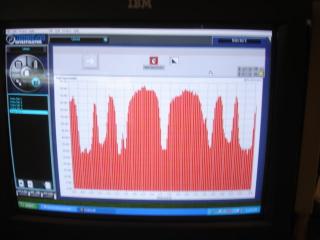
Success.