May 23, 2007


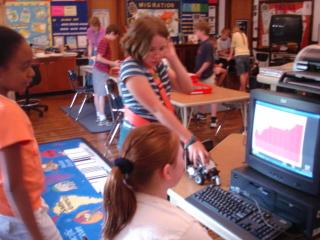
Miller 4th grade
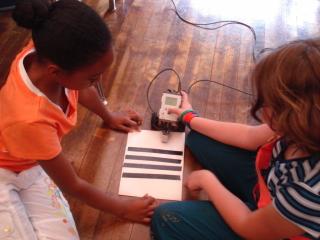
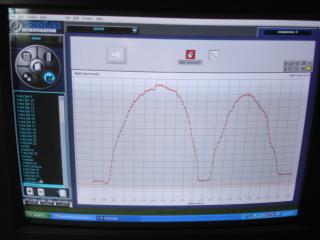
The robot was programmed to go forward and back taking light sensor readings
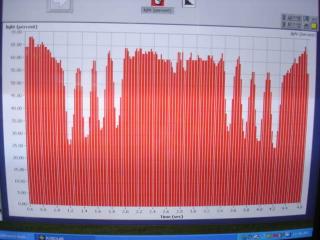
so the graph should have been symmetric but sometimes the robot go caught at the edge of the paper.

Some of the students set up and solved a Sudoku.

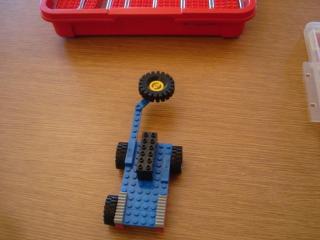
Others took on the challenge of making a car that follow along a wall after bumping into it.


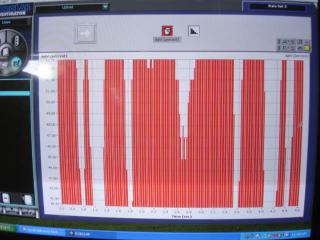
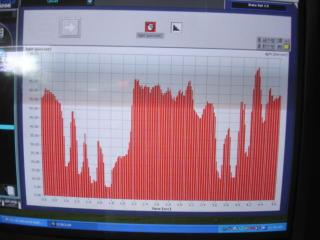
Graphing light sensor data took on some interesting challenges. Find the darkest. Make a graph that increased.
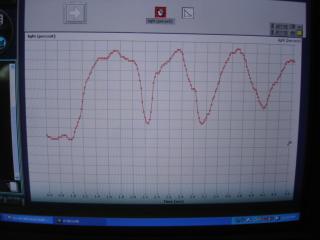
Make an "M". MU


Almost done - we did it.