Visit 24 Hour LEGO City at

April 8, 2003
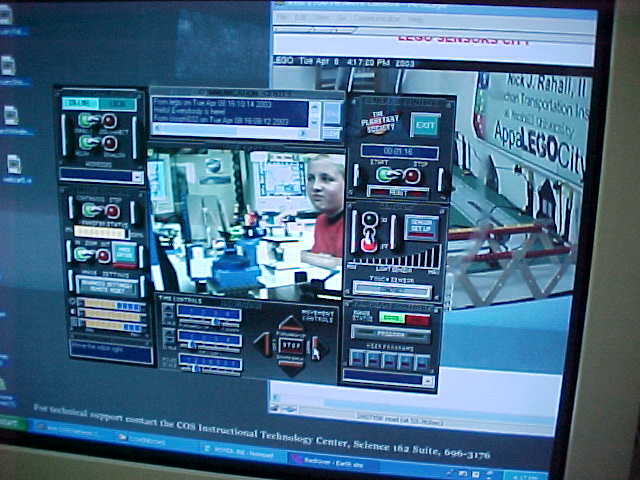
Elementary Students Connect

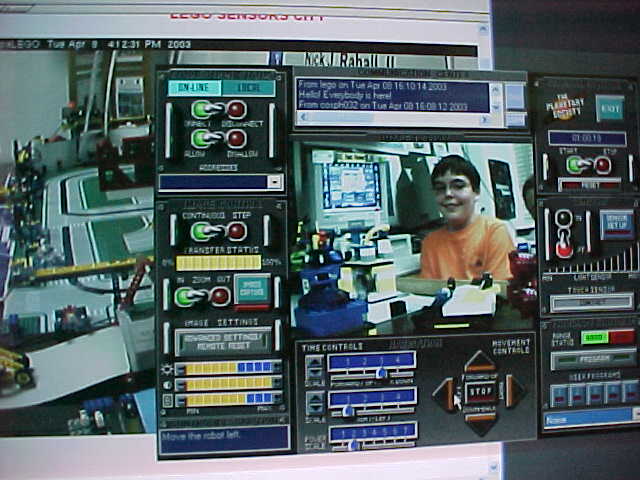
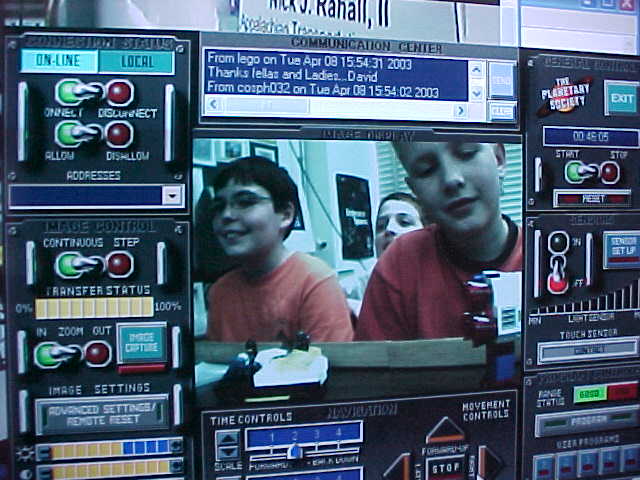
Students from Davis Creek Elementary were on camera to the visitors at the LEGO City at RTI.
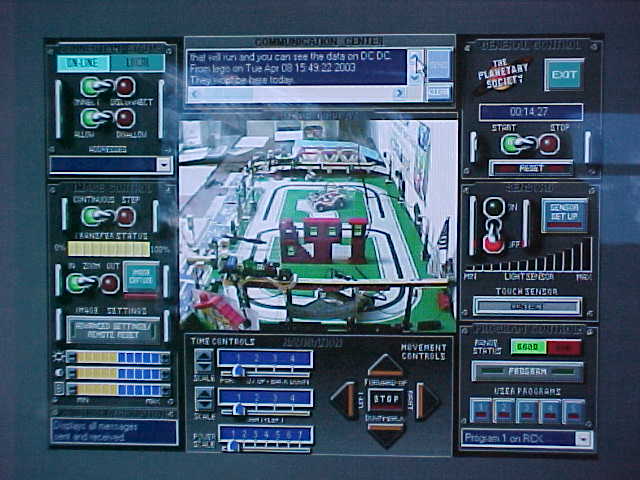
The Davis Creek students teleoperated the transportation models through the Red Rover software
and they ran programming projects through SENSORSCITY.

On the left is the SENSORSCITY camera view and on the right is the Red Rover interface view
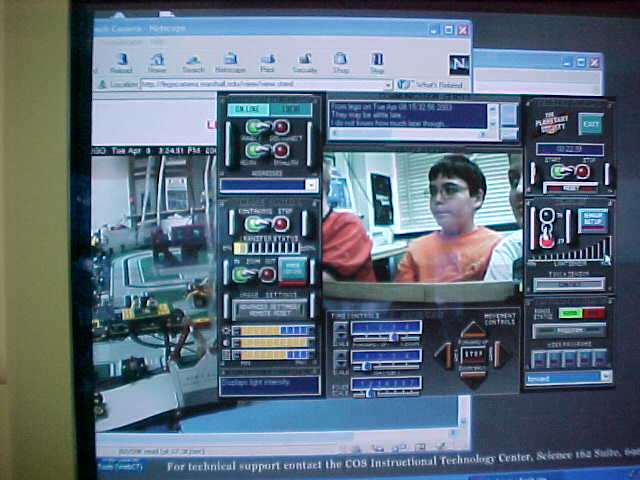
It is raining over at the LEGO CITY, and the bridge is getting flooded
SENSORSCITY Camera in
the back ground and RED ROVER in foreground.

The Davis Creek Elementary students operate the city in the heavy rain.

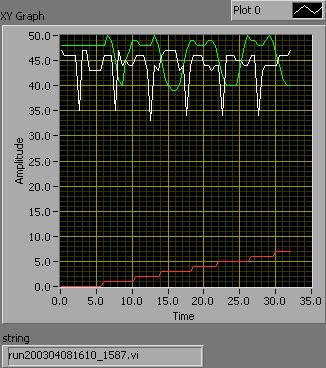
There is a way to measure the level of the river using the light sensor
by sending a programming project to SENSORSCITY.
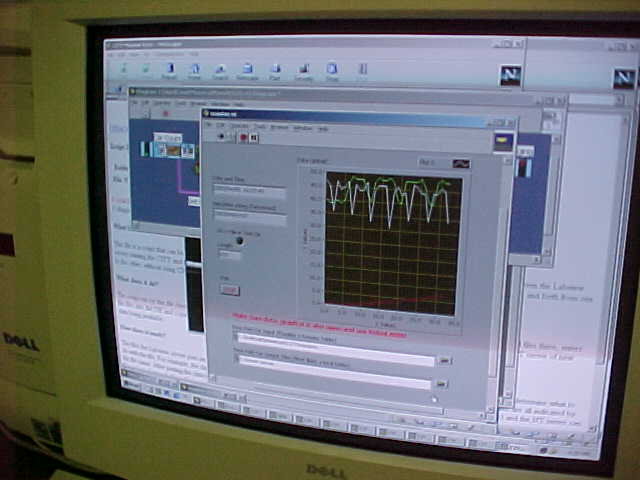
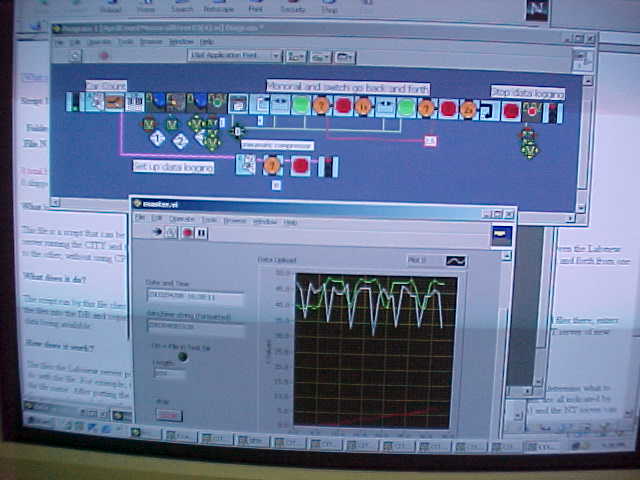
People could view the data at the 24 Hour LEGO City at RTI.