
LEGO CITY

Send programs and get back data from SENSORSCITY
or teleoperate through the Red Rover site.
The directory with Example programs to use at SENSORSCITY are on
http://SENSORSCITY.marshall.edu/CITY/pages/vi/
Click and save a file that ends in .vi to your computer to use to send a mission.
The RoboLab Programs are the files that end in .vi and the .jpg are pictures of the programs.
Note: The traffic goes between the Lamp on port A which is across from the light sensor on port 1.
Monorail motor is on port B and touch sensors on both ends of the track are on port 2.
Port C is the tree.
Port 3 is a light sensor facing the tree.
Send a program to the SENSORSCITY - See Instructions
FIRST LEGO League teams also ran the FLL 2005 Ocean Odyssey over the web.
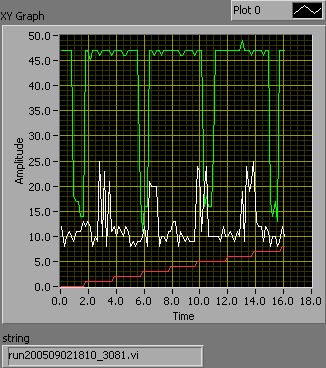
You will get data back. The green line dips at each time the flying turkey passes a light sensor.
The white line is the data back from the reflection from the dancing turkey.
The red line steps up each time the touch sensor at an end of the monorail was touched.
Various parts of the CITY also operate when you run programs through http://lego.Marshall.edu

The rover on Mars South Pole http://lego.marshall.edu
is ready for Teleoperating.
Look closely to the back of the view through http://legocamera.marshall.edu
and you can see the rover move while you run programs through Red Rover.