December 2003

Rudolph is flying over the LEGO City on Christmas.
The physical set up of the LEGO City uses LEGO Dacta Cities and Transportation sets.
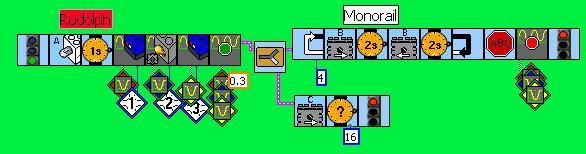
Note: The "reindeer" goes between the Lamp on port A which is across from the light sensor on port 1.
Monorail motor is on port B and touch sensors on both ends of the track are on port 2.
Port C is the Christmas tree and port 3 is a light sensor facing the red, white, blue and yellow and green of the tree.
You can see the action from the Axis camera on SENSORS City Camera on http://legocamera.marshall.edu.
Also there is another monorail and other vehicles you can teleoperate through Red Rover.
Instructions for operating the SENSORSCITY with RED ROVER software are
on http://netapps.marshall.edu/lego/CITY.
You can operate it on the web at http://lego.marshall.edu.
Program 1 runs the monorail
Program 2 runs the gate.
Note: You will need to watch the CITY action on http://legocamera.marshall.edu.
A program for December 2003
The directory with Example programs to use are on
http://SENSORSCITY.marshall.edu/CITY/pages/vi/
Click and save a file that ends in .vi to your computer to use to send a mission to http://SENSORSCITY.marshall.edu
The RoboLab Programs are the files that end in .vi and the .jpg are pictures of the programs.
If you have RoboLab you can make your own Investigator program following the icon pictures.