
LEGO CITY
January 2008

Matt Bailey is setting up SENSORSCITY to run RCX and NXT.
as his Senior Project.

This month there is a New Year's Ball to drop using the RCX
and a NXT robot to move. (At the beginning of the month it is Kylie's "Baby" aka Alpha Rex.)
On the Submit mission page be sure to run the correct program and click
the correct platform.
Send programs to SENSORSCITY.
- See
Instructions-
Click this
link for the directory with Example programs to use at SENSORSCITY.
Click and save a file that ends in .vi to your
computer to use to send a mission.
The RoboLab Programs are the files that end in .vi and
the .jpg are pictures of the programs.
Note: A car goes between the Lamp on
port A which is across from the light sensor on port 1.
Monorail motor is on port B and touch sensors on
both ends of the track are on port 2.
Port C changes each month.
Port 3 is a light sensor facing the Christmas tree
stand.
At times there will be cameras on
http://SENSORSCITY.marshall.edu/city/pages/nxt-cameras.html
if there is no picture try again a different day or try to enable Java.
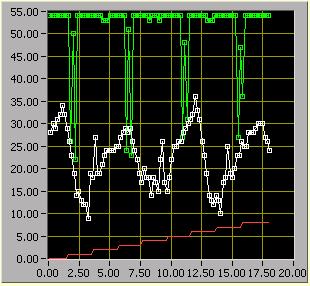
Below is an example of the data you will get back.
The green line dips at each time the car passes in front of light
sensor on port 1.
The red line steps up each time the touch sensor at an end of the monorail
was touched.
The white line is the data back from the reflection from the Clock
stand.
Note some data
line changes for the NXT vehicle at the end of the month.
Color Challenge
See if you can tell what color is in front of the light sensor when
the program stops.
Look at the camera
http://legocamera.marshall.edu
then look at your data to see if
you are right.
Various parts of the CITY also operate when you run programs through http://lego.Marshall.edu
