 LEGO
CITY
LEGO
CITY
March Winds
2013

http://netapps.marshall.edu/lego/SENSORSCITY/2013-03-02Windmills/2013-03-02Windmills.html


Here at SENSORSCITY
you can program things to go around, and back and forth
and get data back
using LEGO® robotics at Marshall
University.
See
Instructions
You also can see the rover move
on the camera at http://legocamera.marshall.edu
as you Teleoperate it on http://lego.Marshall.edu.
Send programs to SENSORSCITY.
- See
Instructions-
Click this
link for the directory with Example programs to use at SENSORSCITY.
Click and save a file that ends in .vi to your
computer to use to send a mission.
The RoboLab Programs are the files that end in .vi and
the .jpg are pictures of the programs.
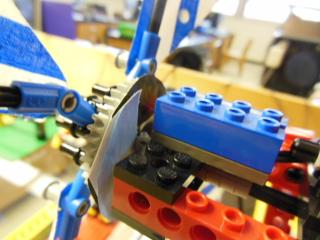
Note: A car goes between the Lamp on
port A which is across from the light sensor on port 1.
Monorail motor is on port B and touch sensors on
both ends of the track are on port 2.
Port C changes each month.
Port 3 is a light sensor facing the flag stand.
(See
the color challenge.)
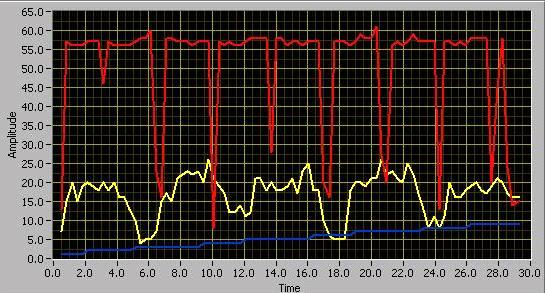
Below is an example of the data you will get back.
The red line dips at each time the car passes in front of light
sensor on port 1.
The blue line steps up each time the touch sensor at an end of the
monorail was touched.
The yellow line is the data back from the light sensor facing the windmill.

Color
Challenge
See if you can tell what color is in front of the light sensor when
the program stops.
Look at the camera
http://legocamera.marshall.edu
then look at your data to see if
you are right.
Various parts of the CITY also operate when you run programs through
Red Rover.
To see the camera refresh faster use Red
Rover as an Earth site.

LEGO simple machines have been constructed on the Space Station.
How will that be different that what I do on earth?
Check http://legospace.com/
November 2012
December 2012
January 2013
SENSORS City through the years
