
SENSORSCITY
May 2008

May Flower Merry Go Round is
on the main table to program to move using the RCX

and a NXT robot to move around on the top level.
On the Submit mission page be sure to run the correct program and click
the correct platform.
Send programs to SENSORSCITY.
- See
Instructions-
Click this
link for the directory with Example programs to use at SENSORSCITY.
Click and save a file that ends in .vi to your
computer to use to send a mission.
The RoboLab Programs are the files that end in .vi and
the .jpg are pictures of the programs.
Note: A car goes between the Lamp on
port A which is across from the light sensor on port 1.
Monorail motor is on port B and touch sensors on
both ends of the track are on port 2.
Port C changes each month.
Port 3 is a light sensor facing the clock stand.
(See the color challenge.)
Below is an example of the data you will get back.
The red line dips at each time the car passes in front of light
sensor on port 1.
The blue line steps up each time the touch sensor at an end of the
monorail was touched.
The yellow line is the data back from the light sensor.
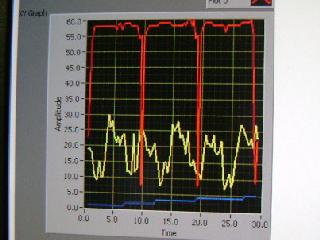
Note some data
line changes.
Color
Challenge
See if you can tell what color is in front of the light sensor when
the program stops.
Look at the camera
http://legocamera.marshall.edu
then look at your data to see if
you are right.
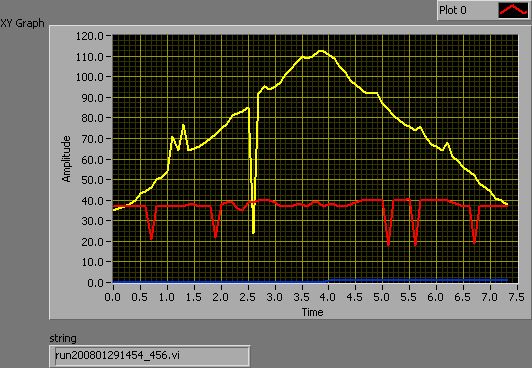
Data that is returned when you run a program to the NXT vehicle shows
distance to objects in front on the yellow data,
lines on the floor on the red data, and the touch sensor is the
blue data.
The NXT vehicle can be watched through the camera on the Red Rover.
http://lego.Marshall.edu
At times there is a camera on
http://SENSORSCITY.marshall.edu/city/pages/nxt-cameras.html
If there is no picture try again a different day or try
to enable Java.

Various parts of the CITY also operate when you run programs through
Red Rover.
SENSORS City through the years