Spring Hill Elementary
April 27, 2006

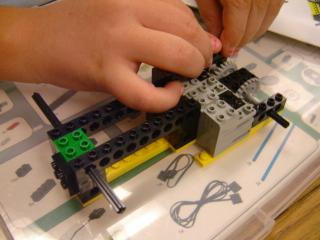
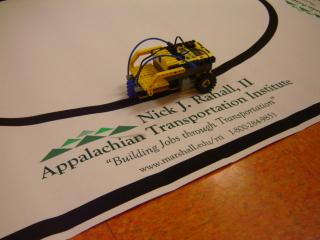
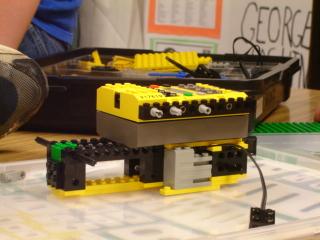
Today the students built and programmed the line follower from the Cities and Transportation sets. This
bot utilizes two motors and a light sensor to follow a line. It can follow a dark line on a light surface or
a light line on a dark surface. We used a very nice printed sheet with a circular track (thanks to RTI).

The students programmed the bot to move left until the light sensor detected the light surface. Once it hit
light, the program made the bot move left until it hit the dark line. A jump was inserted so this process
would happen indefinitely. In effect, this program has the bot follow the line.

