August 23, 2011

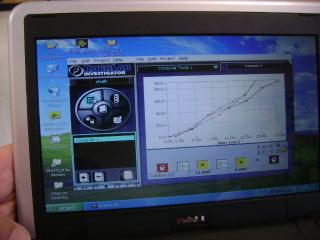
Using an angle sensor and RoboLab
each of the 7 positions can be measured and graphed.
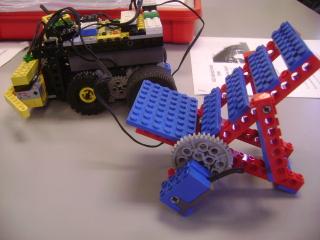


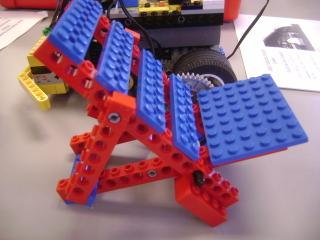
Today they built the chair project.
We will do measuring with a protractor next week.
Using an angle sensor and RoboLab
each of the 7 positions can be measured and graphed.
Today they built the chair project.
We will do measuring with a protractor next week.
|