March 28, 2012

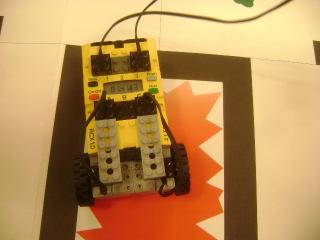
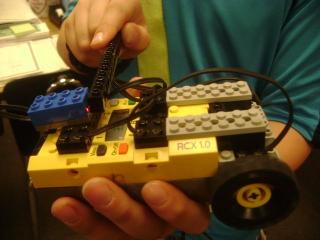
The robotics group challenge today was to program the robot to be remote controlled.

They had to drive from the red to the blue and back using touch sensors.


A program that has two tasks - one to control the left motor with touch sensor 1
and the other to control the right motor with touch sensor 3
works well for forward and turn.



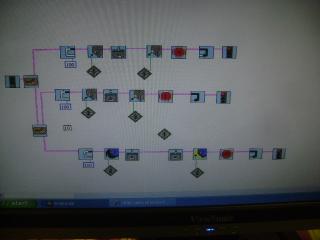
They tested out an idea to use a light sensor to make the wheels go backwards.


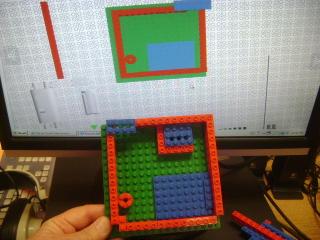
The Red group challenge was to build a shelter.



They used a LEGO CAD to make a virtual version.