Tuesdays students in TAG and Math class are going to work on
the FIRST LEGO League 2004 No Limits Challenge.
At the end of the day small groups of 5th graders are going to build
with the Simple Motorized machine sets and the engineering sets.
Wednesdays and Thursdays the rest of the TAG classes will do LEGO projects.

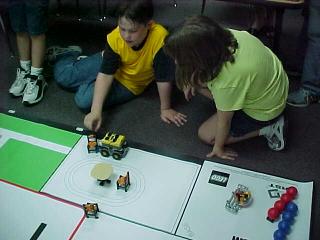




Juan explains the gear ratios.
Plans were to use time for the how long the robot should go forward
and turn.
There are ideas for how the light sensor can be used.


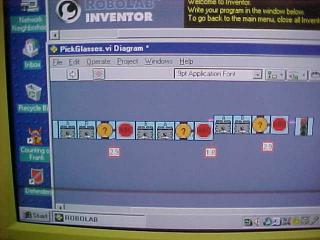

A simple arm and a program and in 15 minutes the glasses are brought
back to base.

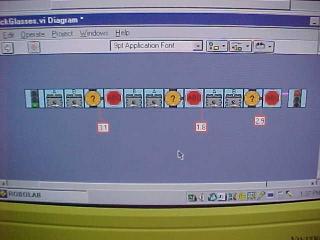

It really works!




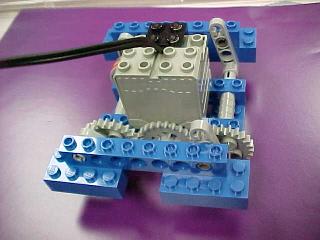

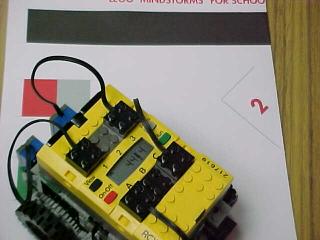
The walker has gears messed from the motor to both front and back.
The car has fly wheels which keeps it moving.


