April 5, 2006
When working out programs ideas early in a new FLL season it is nice
to get ideas of light sensor readings along lines and other colored areas,
rotation sensor numbers to various missions, times until touch, etc. Data
gathering and graphing can be done easily in PROGRAMMER without going into
INVESTIGATOR. Data-logging can be done over the Internet to SENSORSCITY
and data received back anywhere. That data-logging program can be used
as a template. We are going to get practice in data-logging. We will follow
instruction on how RoboLab can be used over the Internet for data-logging
from SENSORSCITY.
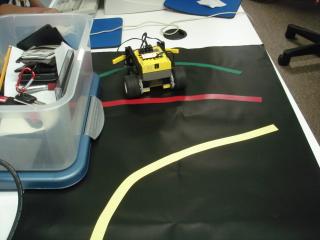
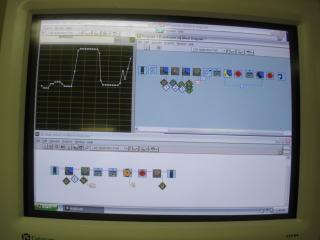
The bot could go for 4 seconds in this area so we programmed it to
stop after 4 seconds.
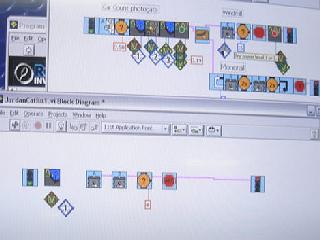
Then we added some of the parts of the program for April on SENSORSCITY.
It is easy to do - just drag them from that program into our program.


Now when the program runs the RCX gathers data on the light sensor.
To see the data we uploaded it using Upload Data.vi.
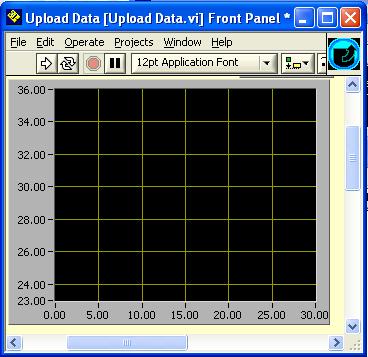
See http://netapps.marshall.edu/lego/1/3Flags/LineFollow.html
for the directions to find it in your Robolab folders.

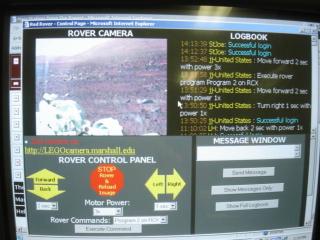
The SENSORSCITY Challenge for April 2006 is to move the train through
Red Rover Red Rover
on http://lego.marshall.edu
at the same time that you run a mission on SENSORSCITY
on http://SENSORSCITY.marshall.edu
There is a light sensor near the car crossing at the lover left picture
on the live camera
on http://SENSORSCITY.marshall.edu
Check to see the data as a graph to see if you made the train pass
the light sensor.


We can see that the train has moved.

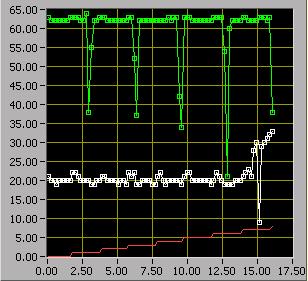
We can see from the data that the train passed the light sensor on
this run.


It is possible from some computers to see three things at the same
time but not today on these computers.
We are having to move all over the room to see each of the computers
that have each of the bottom three links below.