
May 10, 2006

The goal is to have a bot go until the dark paper and return to the same place it started
no matter how close or far it is from the dark paper.
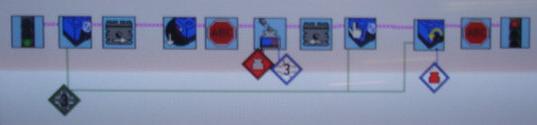
We are trying out containers. Rotation sensor works.



Light sensor reading saved in container needs to be divided by ten.
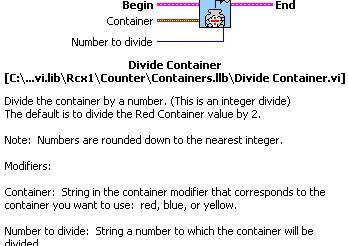
Integer division is causing some round off precision problem but it is not too bad.

This has been a wonderful group to work with this year.