
October 26, 2005

Mrs. Blackman made a paper with black lines for the students to "read" by light sensor on LEGO robots.
We checked out the Investigator program for data logging.


Then we explained that the groups were to figure out how many lines were on the paper
by looking at the graphs that they would get from uploading light sensor data.
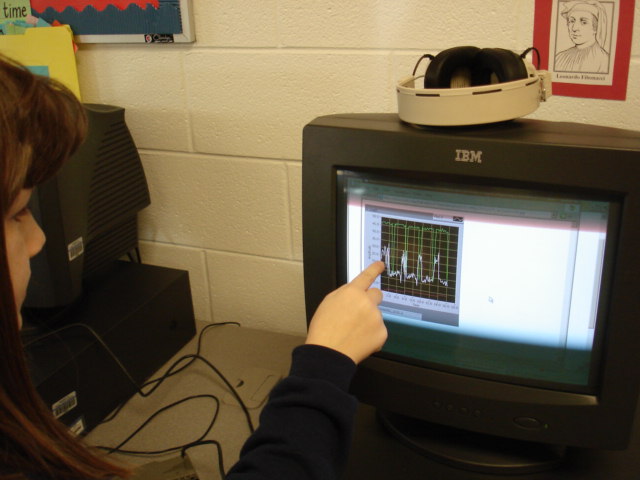
The test was to check out the lines on the floor.
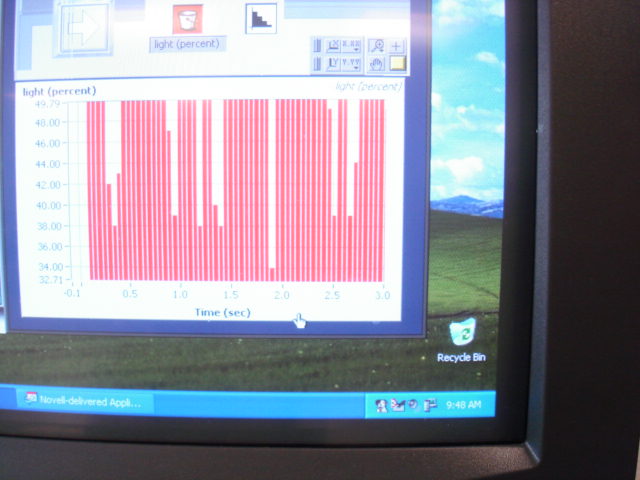
See where the bright areas and dark lines are?

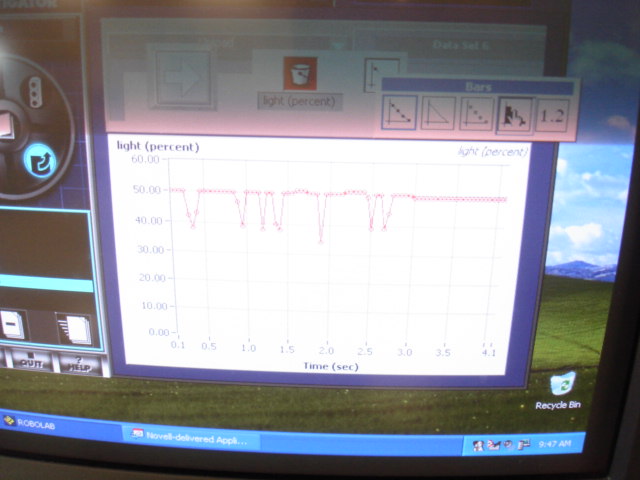
They wrote their programs in level 2 in Investigator to run both motors forward at power 2
and data log the light sensor on port 1 for 2.5 seconds each .05 second.
Then the bot was run under the teacher desk (so no human would see the lines).
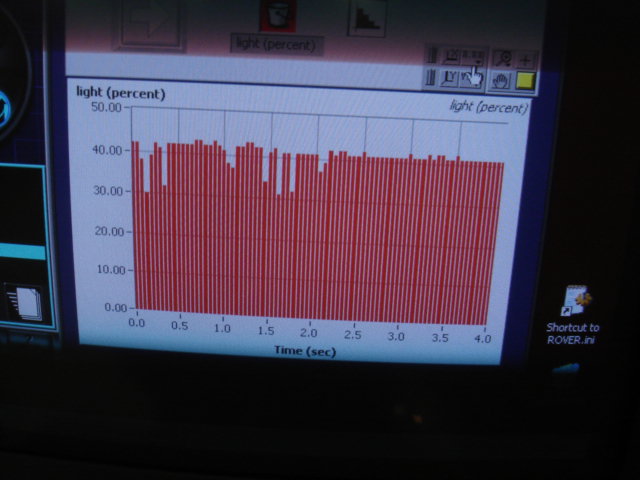
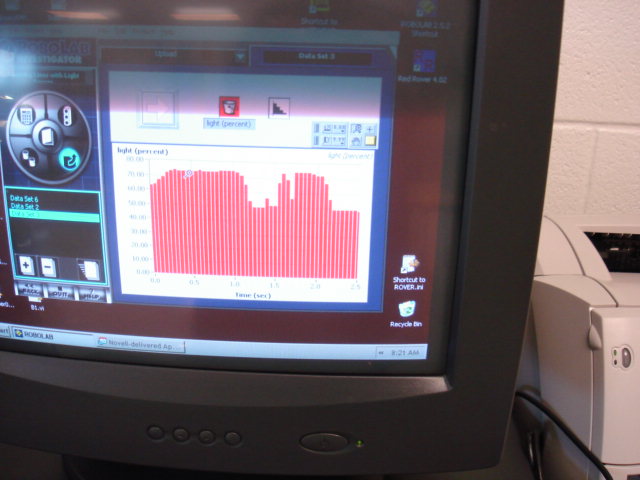
The bot was brought back to the computer, a data set add, the data UPLOADed, and bar graph made.
From that graph the students were to figure out how many lines.
This data logging is like the remote data logging that can be done from
Marshall University SENSORSCITY.