The robots can find distances by datalogging light sensor readings.
Each time the wheel goes around, the black dot passes in front of the lights sensor once
February 1, 2007


Fifth grade Village of Barboursville TAG


Circumference around one wheel is measured.


Find how many times the wheel goes around from one side of the room to the other.
A quick estimate can be found by pacing out about meter steps.


The Investigator program set up the light sensor for datalogging.

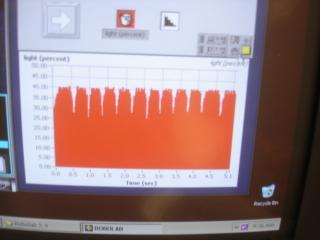
Then the data from one run across the room is uploaded.
Each dip in readings is one circumference length. Multiply out and get the room length.

End with a bit of Sudoku.