February 26, 2008
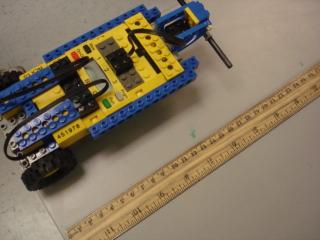
The distance the RoboRover travels in one rotation is the circumference of the wheel.
We put wet marker on one spot and rolled the rover. Then we measured the distance for three spaces
and divided by three. Measuring with a thick cord gave a little bigger number.


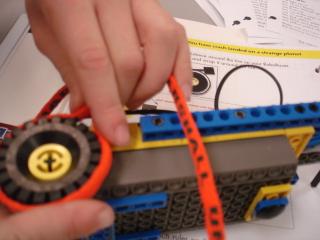
We followed the instructions to build a measuring devise using a light sensor.
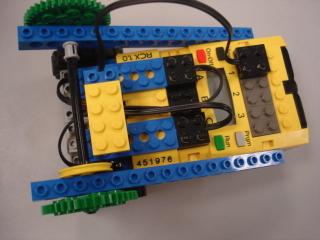
Next time we will program it to take light sensor data and up load it.
