February 9, 2011, 2011


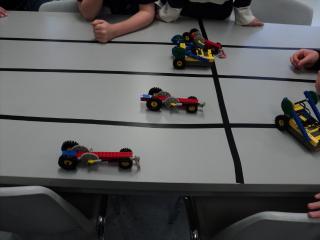
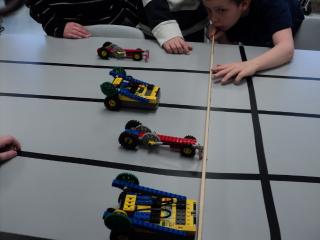
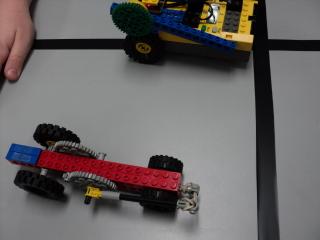
While part of the class built pull back cars
the programming group worked with light sensors.
It is sort of like "seeing" that your hand is is front of your eyes when your eyes are closed.

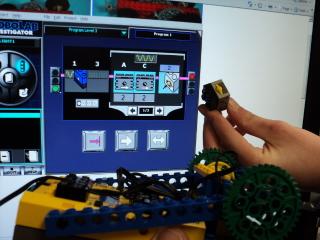
They are doing the data logging in the Alien Adventures project.
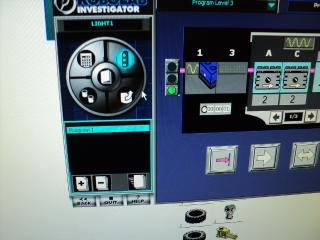
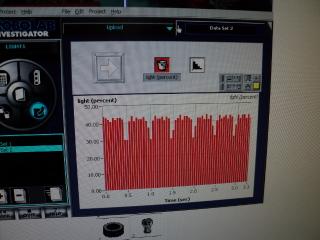
Using the data from their trial runs on the floor they can figure out how long to run the rovers on the table.
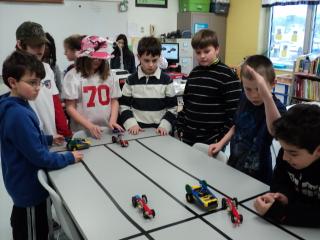
The closest to the line (with out going over) wins.