April 18, 2012

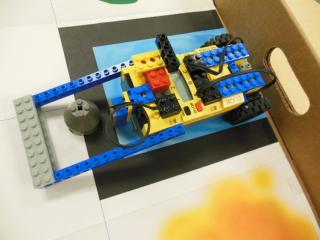
One group is using a light sensor to help a robot retrieve rocks
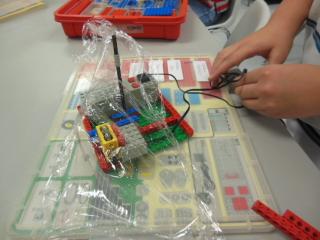
and the other is making a project to collect Oxygen.

Since the robot has to start inside base it has to go a short distance before it can start sensing for dark.

Go until dark and go back.
The "ARM" is balanced so that it drops when the bot reverses direction.