Nick J. Rahall, II Appalachian Transportation Institute
Education graduate students at Marshall University trained to take
LEGO Transportation on Wheels to schools.
They learned to program, build LEGO Dacta Cities and Transportation models,
organize materials, run the Red rover software,
and send programs to SENSORS CITY.
The LEGO Transportation Outreach On Wheels will go out to schools in
West Virginia including schools in McDowel County to continue robotics over the web from
Big Creek High and other schools.
These three trained for 12 hours during 2 half days and one long day.




They checked out the LEGO Dacta building instructions.
Then they programmed the RCX, the LEGO microcomputer, using RoboLab.



At the LEGO City at Marshall University they used the Red Rover
program to run the City and
the Rover at Davis Creek Elementary.

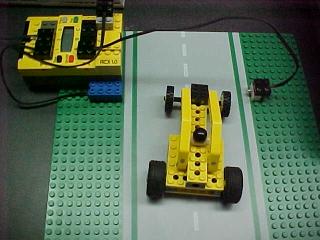
One car used one motor and gearing to go both right and left.

With two light sensors the program can have one motor go
when one sensors reads greater than the second,
or the motor on each side can turn until the opposite sensor reads
brighter,


then the car can follow a light.


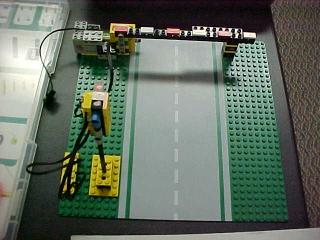
The speed trap is set up with two light sensors.
The timer is zeroed out when the car goes through the first photo
gate.
If the time is greater than the time set then the car is going slow
enough
and if the time is too short then the red light goes on.


The monorail was programmed to reverse when the light on the end
read brighter.


The motor can be used as a dynamo.
Connecting a motor to a light and making the motor shaft rotate
generates electricity.


Today's City has a monorail that can be controlled by light, a speed
trap, a gate and three cars.


The other car uses a motor for each side.
One of the cars is an "intelligent" means of transportation in that
it is a line follower.
This car visited SENSORSCITY.
The program for a car with two motors and a light sensor.

Programs can be sent over the internet and run at SENSORSCITY.
Information comes back as live video and Excel file and graph.

December 12 - 14, 2001
Full page
LEGO Links of Linda Hamilton