


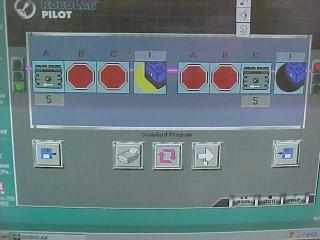
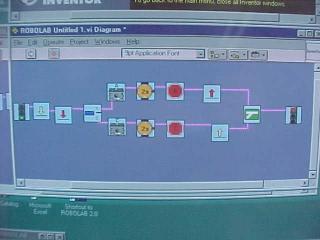
One way to get a robot with a light sensor on port one to follow a line is to use RoboLab pilot level 3.



One way to get a robot with a light sensor on port one to follow
a line is to use RoboLab pilot level 3.
Jumps make the program go forever.
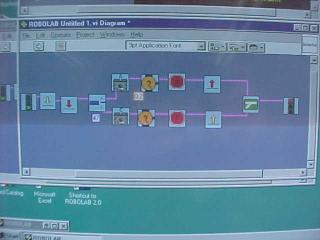
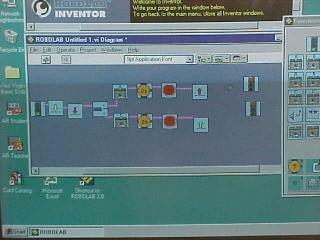
Another way is to use a light sensor fork.



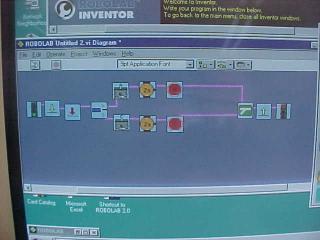
Using waituntil light and waituntil dark works.

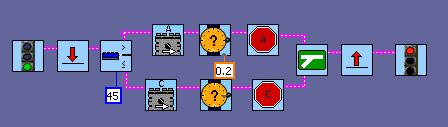

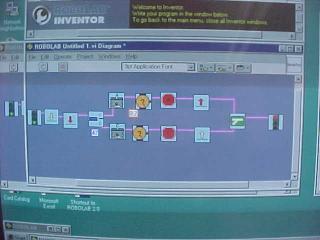
This was the program that worked the best today. It used loops
and actually stopped at the end.


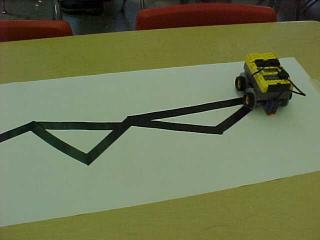
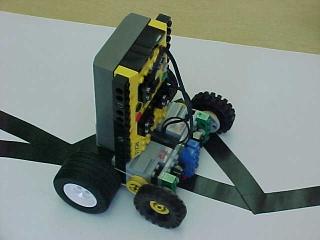
The LEGO City uses a
line following program.