using the RoboTechology sets


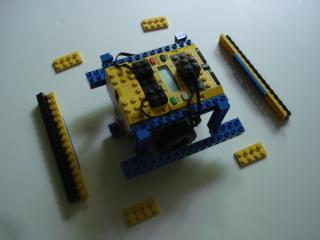
Blue 2 by 6 plates with red blocks, touch sensors, wire and 1 by 2 plates
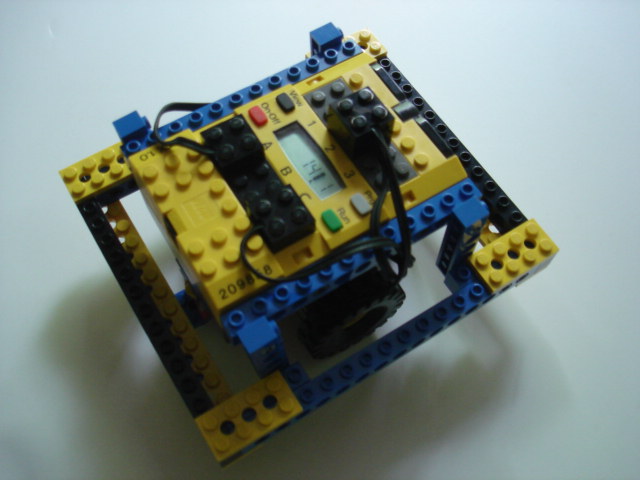
have skids under the bottom.
The motors go in the middle.
It is safer to leave the wheels off until later.


Half gray connectors go into the RCX to connect the blue 12 beams to the RCX.
Hang blue 6 beams by GRAY connectors and place GRAY connectors in the ends.



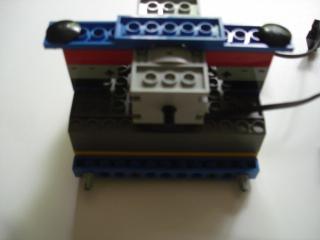
The front bumper is black with two 2 by 8 yellow plates under.
Note the 1 by 8 blue plate goes under the yellow on the side that is NOT under the black beam.
It is needed to bump the touch sensor.
The sides are blue 16 beams with two 4 beams held on at the ends by black connectors.
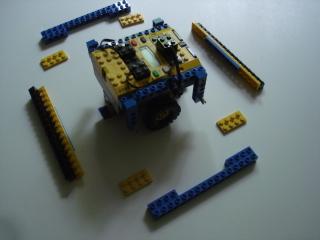

Place on sides, front, and cover with 2 by 4 yellow plates.


Careful with wires. They need to NOT rub.
Motors go on A and C.
Check to see that forward in a program is forward on the bot.

Both touch sensors go on port 2.
Be careful that the wires do not rub.

RoboLab 2..5.4 can use the flip motors and needs some time for the view to stay on.

This works in RoboLab 2.9.3.