rate = distance / time
r=d/t
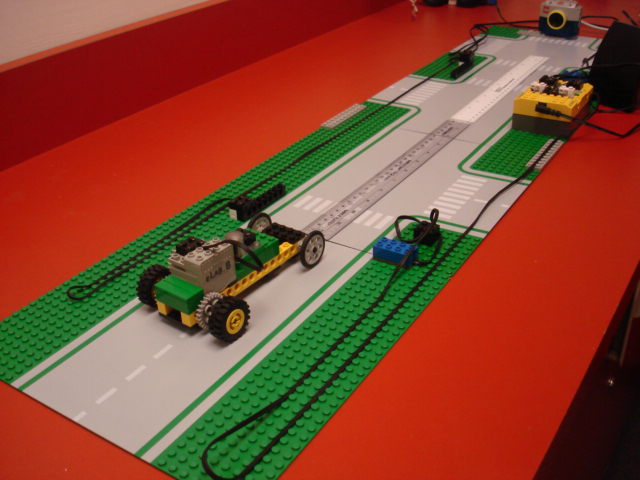
The Cities and Transportation sets have a speed trap.
There is a RoboLab program on the Cities and Transportation directory.
Modify the set up to have a longer distance between light sensors
for the start and finish line.
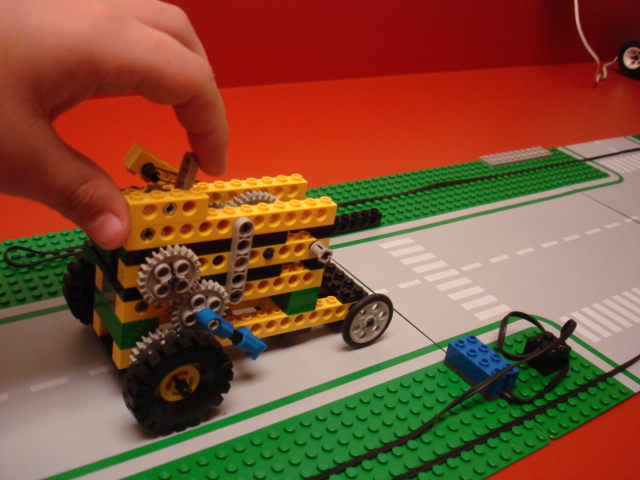
Using the eLab sets build the rubber band strain car and the capacitor car.
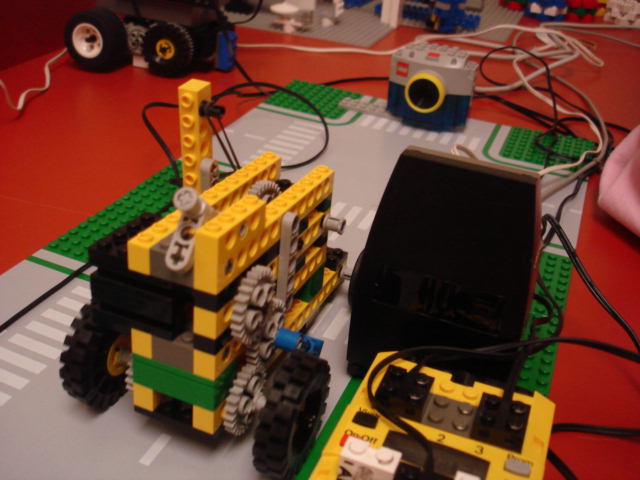
Set up Vision Command if you would like to view on camera.



Measure the distance between light sensors.
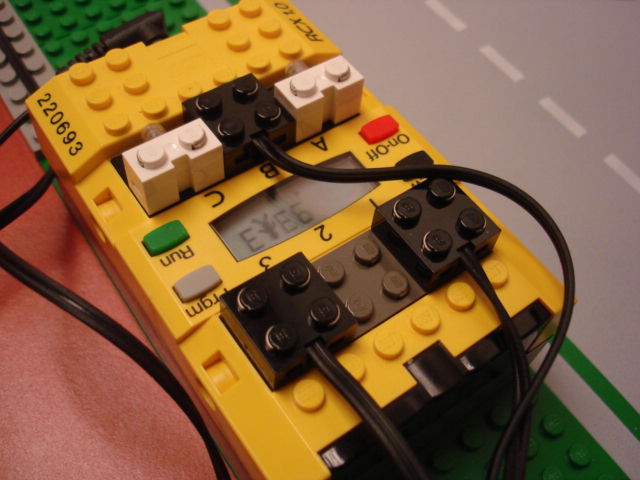
Program the RCX to show red container value for a few seconds so you can see the results.
Or open Interrogate RCX in project menu and view the red container.
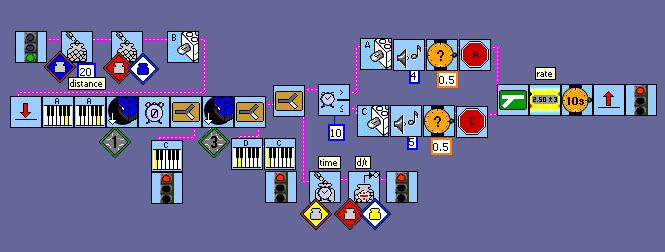
Place the distance in the blue container.