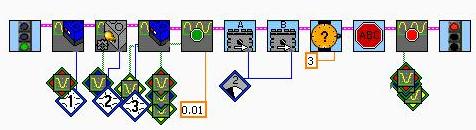
Write a new
program and drop in the data logging icons, run the program and"see" the needed information.
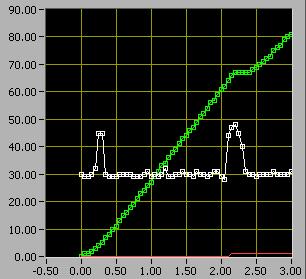
This graph
shows that the robot crossed the yellow line twice two seconds apartand the rotation sensor went through 68
sixteenths of a rotation before the first touch.