SENSORS in Investigator
January 29, 2004


The plan was to do data logging in RoboLab Investigator.
Programming the motors to go with the values of the sound sensor
worked to have the car go forward and backwards with quiet sound and loud.
But then when we looked at the graph we saw nothing.
The sensor worked just before at Barboursville Middle.
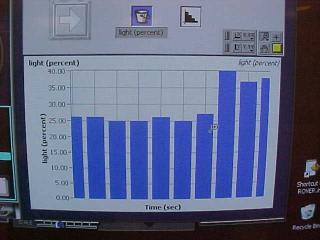
We tried out the program with at light sensor.
That worked wonderfully to have the car toward a white box and away.
But when we uploaded the data we saw nothing.
Changing the graph to a bar graph did work. Data was there as numbers also.
We could see dots but nothing on line graph or line with dots.


They wrote a program to loop to go forward until the white box and then back until touch.


We visited Mars stations at Davis Creek and Marshall.
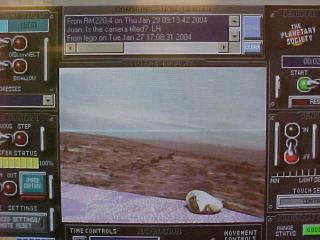
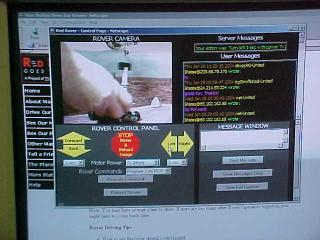
Marshall can be operated on Red Rover or over the web.
Data can be gotten from programs sent to SENSORSCITY.